TwinCAT XAE-Shell
Utilisation de TwinCAT XAE Shell
Information importante : TwinCAT peut fonctionner depuis une VirtualBox, mais dans ce cas, il est nécessaire de passer sur des cores isolés. De plus on oublie les performances temps réel! Les méthodes détaillées ci-dessous correspondent à une installation classique.
Nous allons dans un premier temps nous focaliser sur l’utilisation de TwinCAT XAE Shell que vous pouvez lancer depuis le menu démarrer.
Configuration de l’interface Ethernet
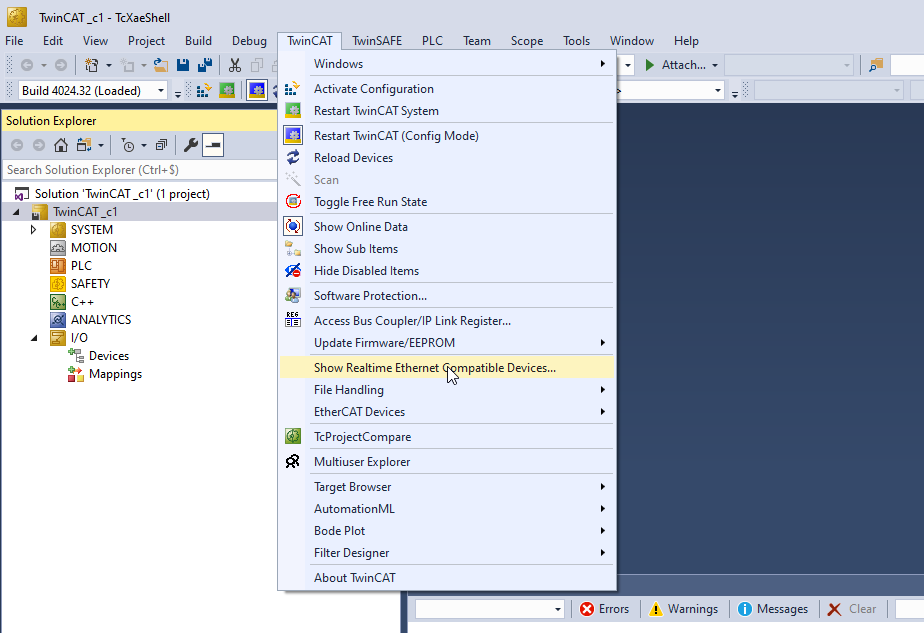
Nous allons tout de suite configurer l’interface réseau afin qu’elle puisse détecter les Runtime d’IPC ou les I/O déportés sur bus EtherCAT. Dans l’onglet TwinCAT, allez dans Show Ethernet Compatible Devices…
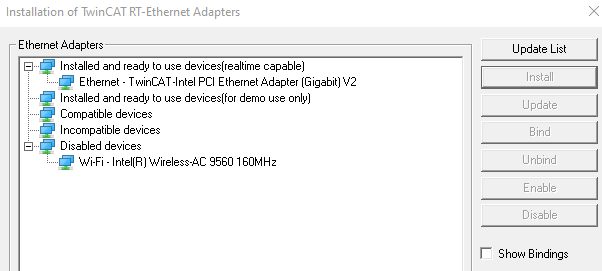
On installe la carte réseau filaire compatible
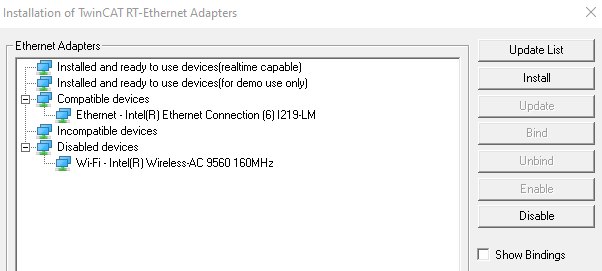
Deux possibilités:
- vous avez une carte réseau Ethernet Intel compatible avec Beckhoff et vous pourrez profiter des performances temps réel. La carte apparaitra dans les “realtime capable”
- votre carte est d’un autre fabricant, vous ne profiterez pas du real-time, mais c’est suffisant pour les essais que nous ferons. Votre carte apparaîtra dans les for demos use only.
Sur mon Dell Pro, il y a une interface Intel compatible Real-Time. Les essais avec un PC fonctionnant avec une carte Realtek n’ont pas posé de soucis également. Tant que l’on ne cherche pas les performances Realtime il n’y a pas d’inquiétude à avoir sur le type de carte Ethernet utilisé.
Premier programme PLC
Dans cette section, nous allons mettre en oeuvre un automate. Ceux qui ont suivi les articles sur Codesys vont remarquer que l’interface de programmation est très proche. C’est normal car TwinCAT est basé sur CodeSys pour la partie programmation automate en langage IEC-61131-3.
On crée un automate en faisant un clic droit sur PLC puis Add New Item
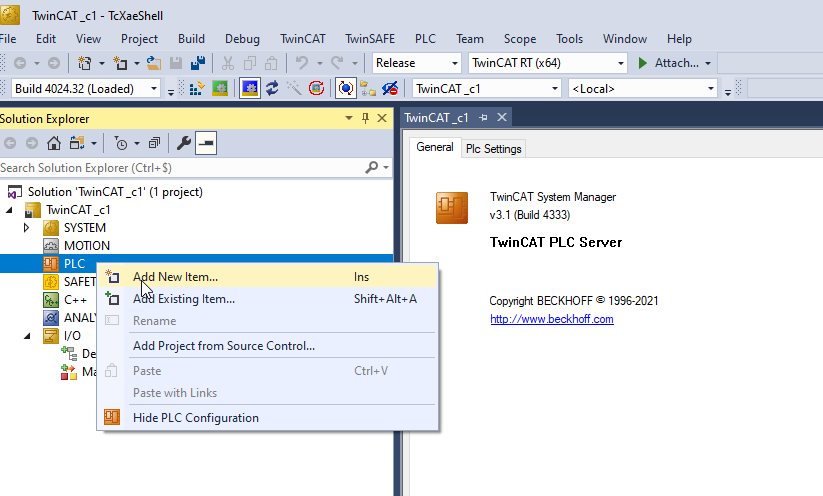
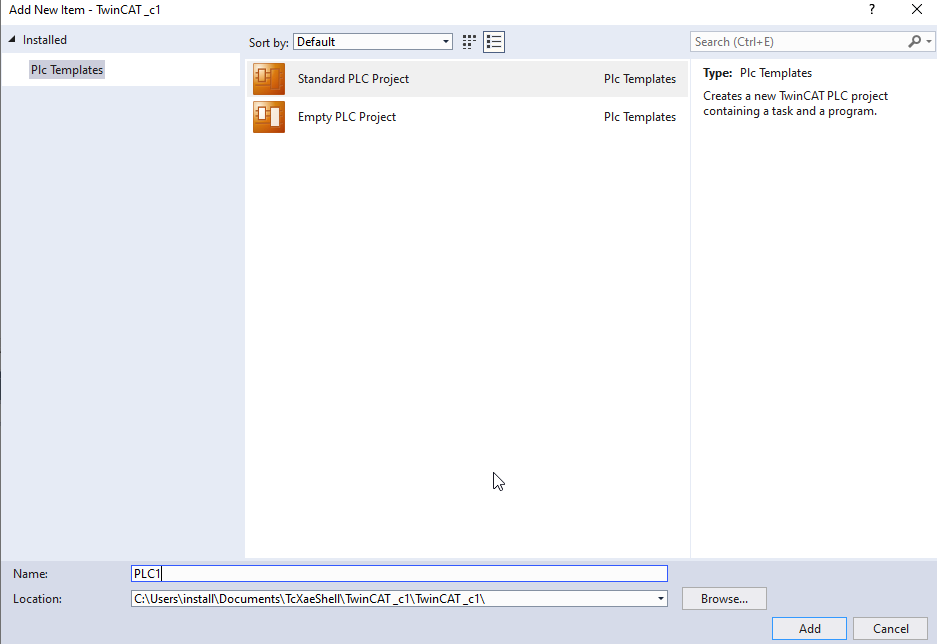
On choisit :
- Standard PLC Model,
- que l’on nomme PLC1
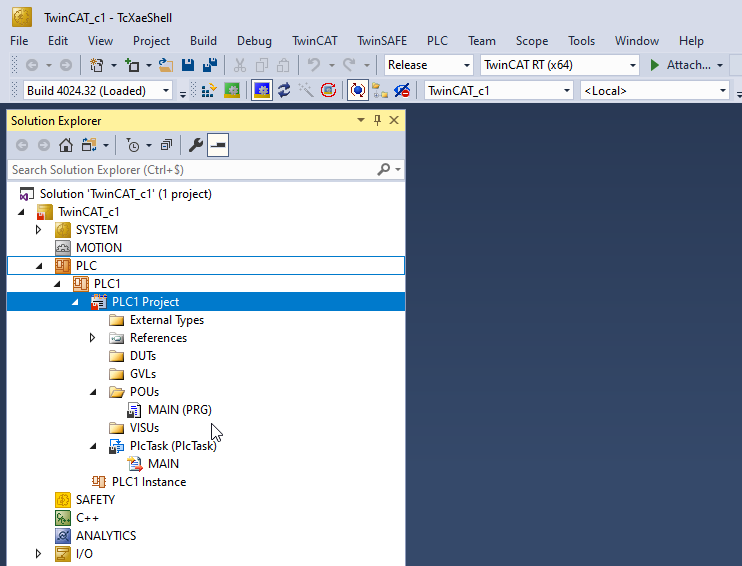
On déploit PLC1, puis POUs pour Program Organization Unit.
Un fichier MAIN(PRG) s’y trouve.
Programmation du Main
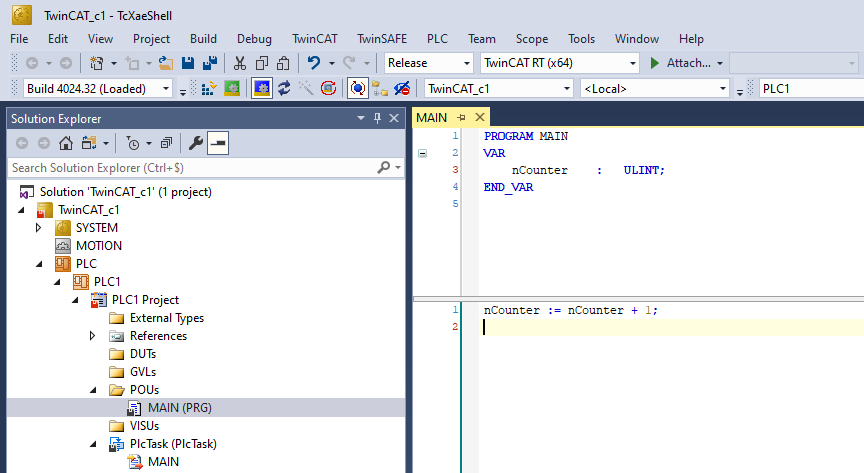
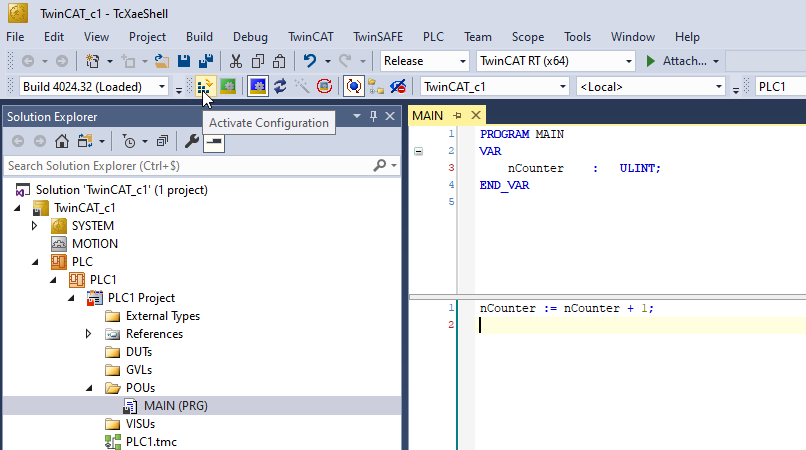
Le premier programme que nous allons réaliser pour valider le bon fonctionnement de l’installation est un compteur qui va s’incrémenter toutes les 10 ms, c.à.d., tous les temps de cycle associés à la tâche PLC1.
Une variable nCounter de type Unsigned Long Int est déclarée, et dans le main, nous ajouterons +1 à cette variable. Si tout se déroule correctement, au démarrage, la variable sera initialisée à 0 et toutes les 10 ms, elle va s’incrémenter.
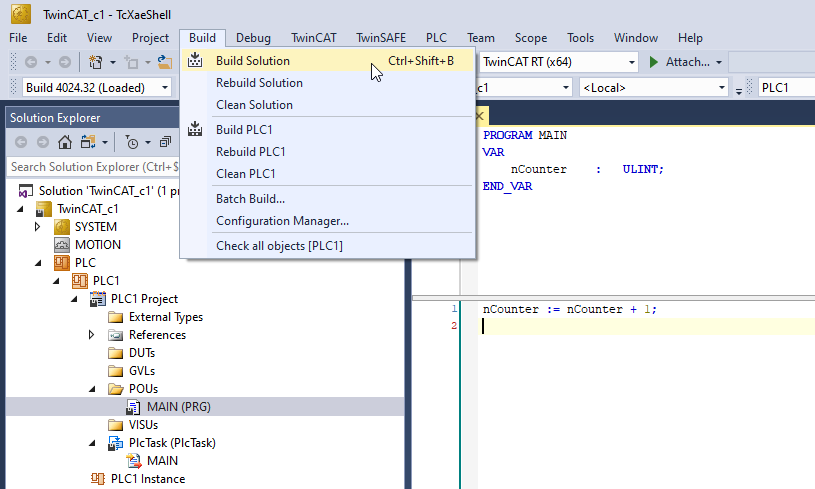
On n’oublie pas de sauvegarder le projet.
On lance le Build du projet
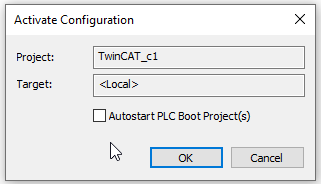
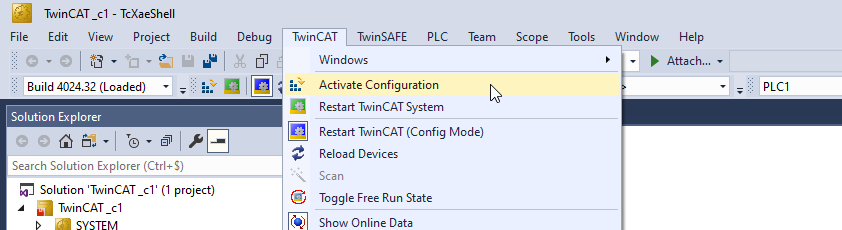
On active le projet avec Activate Configuration pour que ce soit celui-ci qui sera déployé dans le Runtime d’éxecution.
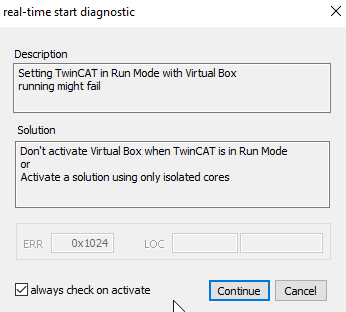
Il se peut également que vous ayez un message de ce type : faire Continue
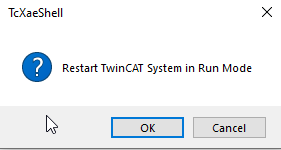
On fait deux fois OK pour activer la configuration et pour accepter le passage en Mode Run (on était en mode Config actuellement)
La case verte avec la roue doit être activée, pour que l’on soit dans le mode Run. (La case bleue représente le mode Config)

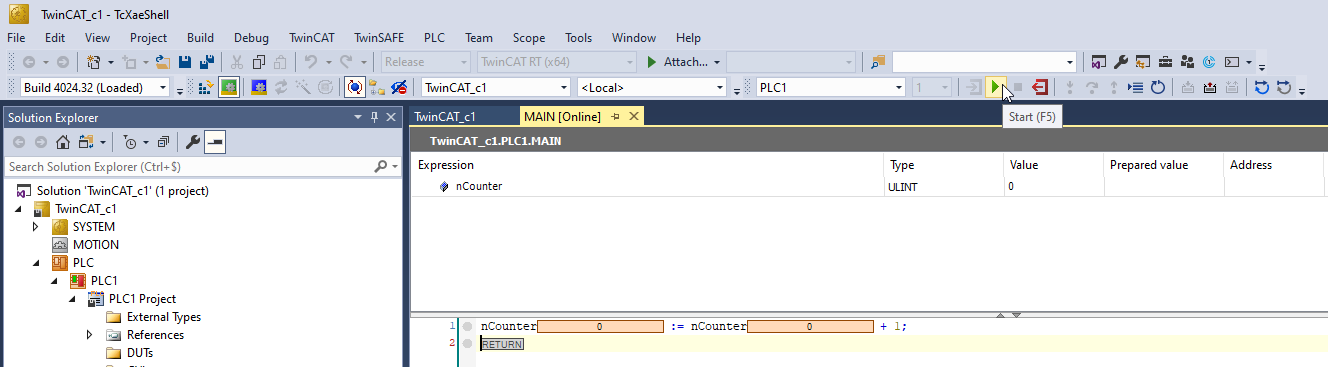
On clic sur la case verte Login

On autorise la création de l’application et le téléchargement de l’exécutable dans le Runtime en cliquant sur Yes.
On clique sur le bouton Start (F5) pour démarrer l’application
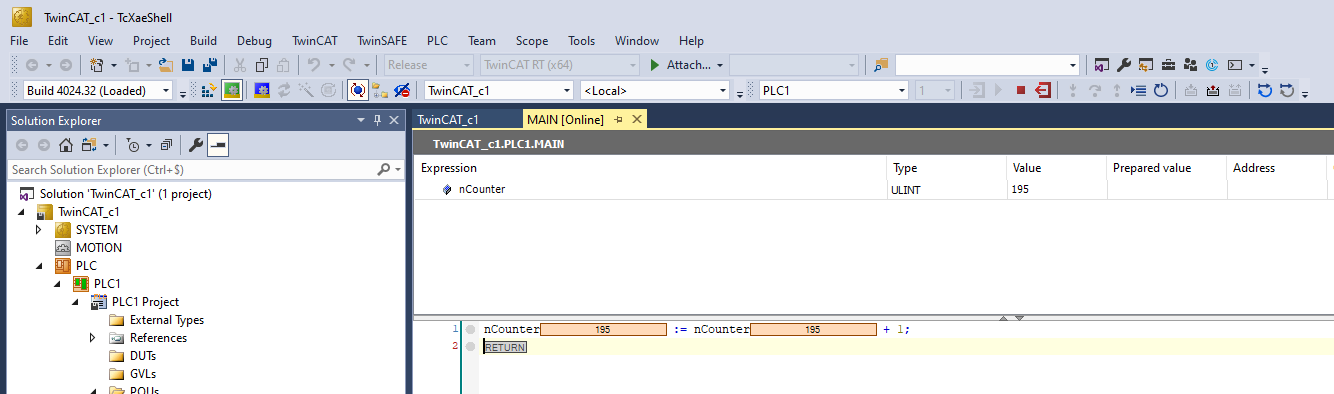
On observe l’incrémentation du compteur, (on augmente de 100 toutes les secondes)
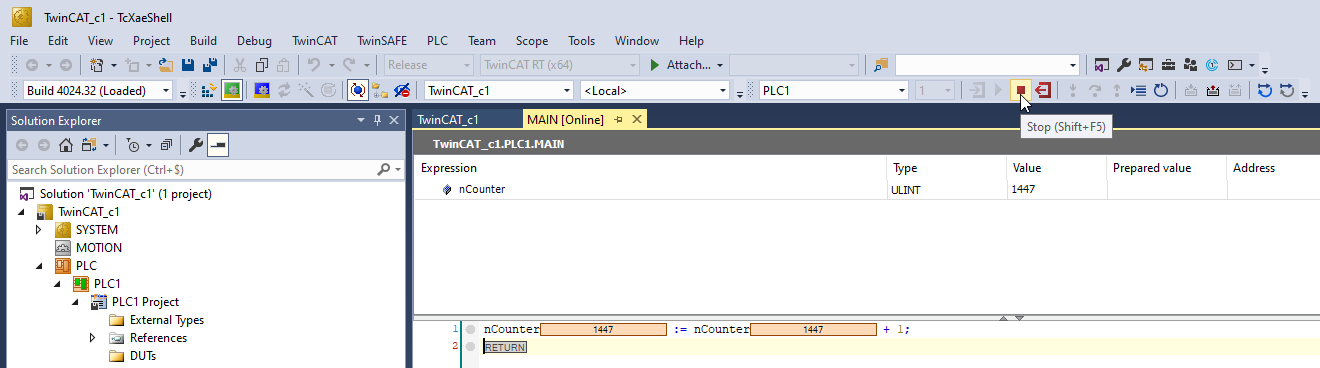
Pour stopper le Runtime, on clique sur Stop (Shift+F5)
On peut se déconnecter du Runtime en cliquant sur Logout

Pour revenir dans le mode de configuration, cliquer sur :
- Restart TwinCAT Config Mode
Bilan :
L’objectif de ce premier programme était de vérifier la bonne installation de TwinCAT3. Si vous n’arrivez pas à exécuter le code, vérifiez que :
- le driver pour la carte Ethernet est installé et que celle ci apparaisse soit en compatible Real-Time, soit en use for Demos Only
- le build de votre projet soit effectué après avoir enregistré le programme
- le projet est activé, ne pas le faire génère des erreurs difficiles à interpréter
- que vous ayez passé Twincat en Mode Run (la petite roue dans la case verte)